Additional Information
| Manufacturer | |
|---|---|
| Brand | |
| Specialty |

The iSR’obot™ Mona Lisa is a robotic platform for transperineal prostate biopsy that combines MRI-ultrasound fusion imaging with automated needle guidance. Designed for accurate, reproducible sampling — including hard-to-reach apex, anterior and peripheral zones — Mona Lisa supports targeted, saturation, and systematic biopsy approaches through just two skin puncture points.
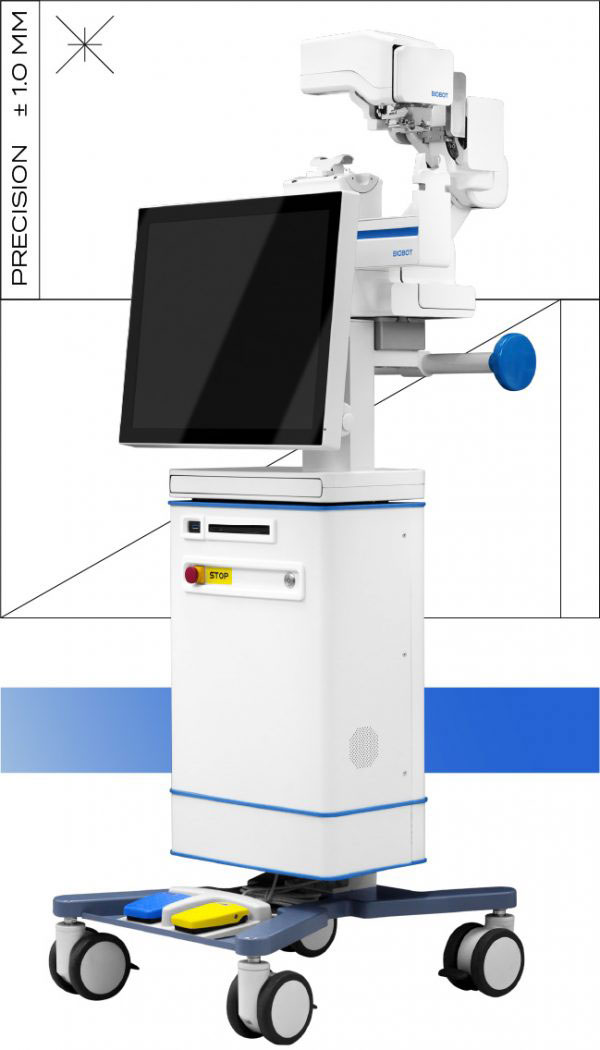
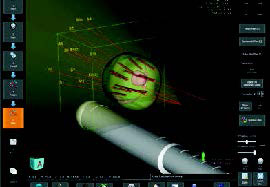
Mona Lisa’s navigation system delivers precise needle positioning and depth control, supporting fast and accurate biopsy collection, including challenging apex, anterior and peripheral regions.
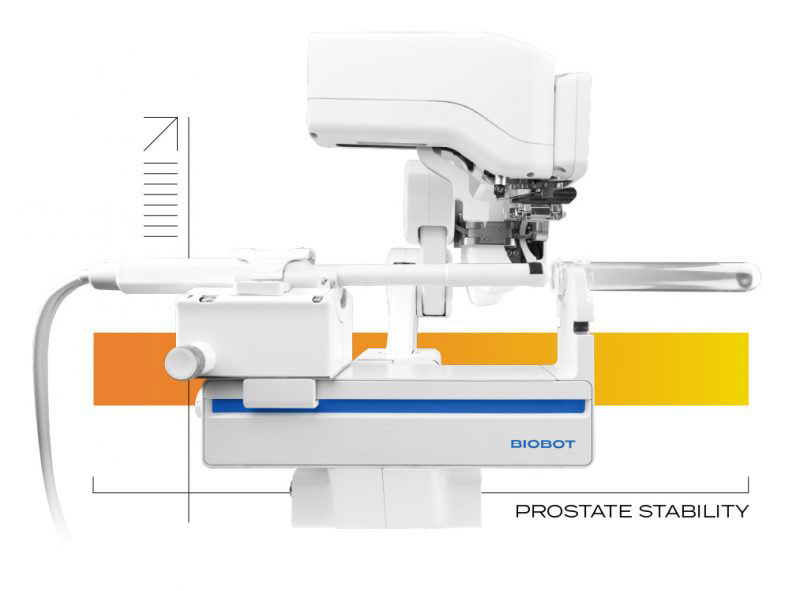
A purpose-designed probe sheath allows the ultrasound probe to move unobstructed while keeping the prostate stable. Reduced gland deformation means the planned core location matches the actual tissue location at the moment of sampling – preserving the targeting accuracy established at planning.
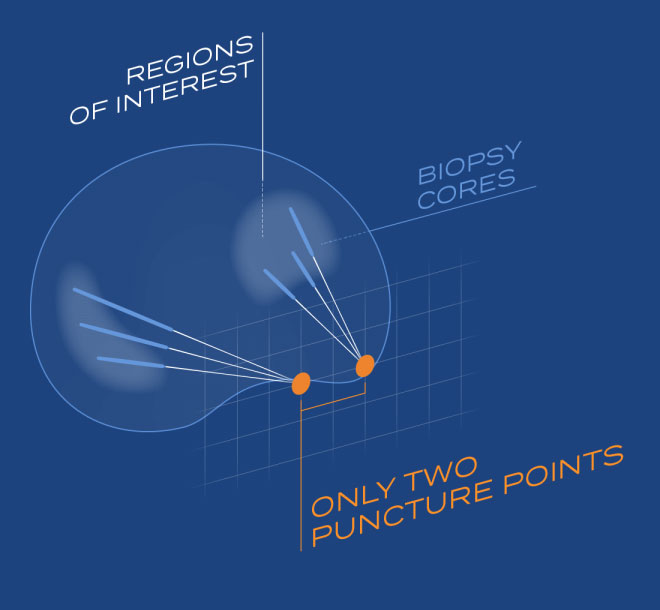
Mona Lisa’s dual-cone design minimises pubic arch interference by creating two virtual pivot points – allowing the full sampling plan to be executed through just two skin puncture points, regardless of patient anatomy. The result is comprehensive prostate coverage with minimal perineal trauma.
The automated yet flexible biopsy planning system allows urologists to easily customise biopsy plans. The urologist retains full control – core locations can be added, adjusted or removed at any stage of the procedure.
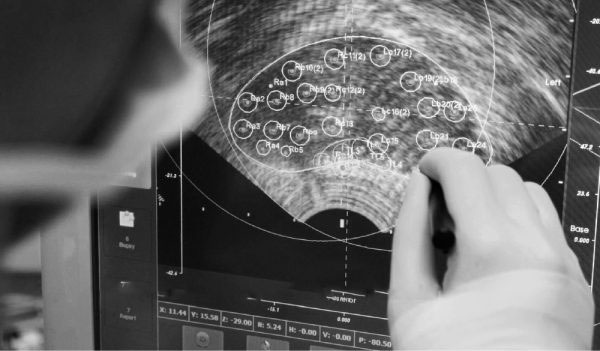
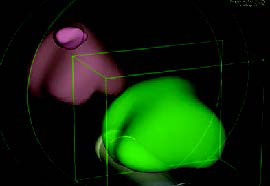
Elastic fusion of pre-operative MRI and live ultrasound imaging provides clinicians with detailed 3D visualisation, supporting precise targeting of regions of interest.
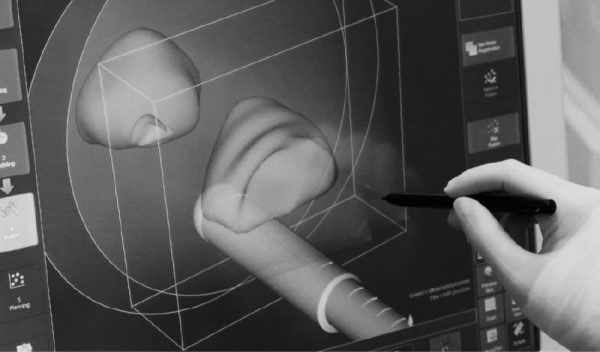
Biopsy planning and execution

The information contained within this website is designed and intended for healthcare professionals only.
Endotherapeutics will not be liable for any actions taken in reliance of the information contained within the website. The information contained within the website does not constitute medical advice.
If you are a patient who requires treatment or management of a medical condition, please click No and you will be redirected to Endo Personal Care.